













基于 PC 的控制技術(shù)在海洋資源與環(huán)保領(lǐng)域中的應(yīng)用
據(jù)研究數(shù)據(jù)表明,水域中的廢棄物約有 70% 會(huì)沉入海底或分解成微塑料和納米塑料,總量高達(dá) 1000 萬(wàn)噸。在 MAELSTROM 開(kāi)展的一個(gè)研究項(xiàng)目中,他們以人工智能系統(tǒng)為基礎(chǔ),開(kāi)發(fā)了一種自主式機(jī)器人,它可以在 20 米深水域處選擇性地識(shí)別和收集廢棄物。該系統(tǒng)通過(guò)基于 PC 的控制技術(shù)自動(dòng)控制,已于 2022 年 9 月在威尼斯運(yùn)河通過(guò)了試運(yùn)行。
如果想要防止垃圾危害脆弱的水下生態(tài)系統(tǒng),或者防止微塑料和納米塑料通過(guò)食物鏈進(jìn)入我們的身體,就必須阻止水域受到進(jìn)一步污染,清理水下垃圾。這正是歐盟“地平線 2020” — MAELSTROM 項(xiàng)目的目標(biāo):開(kāi)發(fā)和整合各項(xiàng)技術(shù),以識(shí)別、清除、分揀各類海洋垃圾并將其轉(zhuǎn)化為原材料。為此,一個(gè)由西班牙 TECNALIA 研究院、法國(guó) CNRS-LIRMM 機(jī)器人研究所和意大利 Servizi Tecnici 公司組成的國(guó)際研究小組開(kāi)發(fā)了“海底垃圾清理機(jī)器人”。其核心是一個(gè)配備抓手和抽吸裝置的水下機(jī)器人,借助 8 個(gè)絞盤在六個(gè)自由度內(nèi)靈活移動(dòng)。
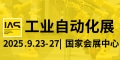
 手動(dòng)控制顯示屏:操作人員可以看到水深測(cè)量地形圖。該圖定位在機(jī)器人平臺(tái)的內(nèi)部區(qū)域(橙色矩形)的中心。紅色矩形表示安全工作區(qū)域,機(jī)器人平臺(tái)與纜索之間不會(huì)發(fā)生碰撞。下方區(qū)域表示鋼纜的拉伸應(yīng)力。
手動(dòng)控制顯示屏:操作人員可以看到水深測(cè)量地形圖。該圖定位在機(jī)器人平臺(tái)的內(nèi)部區(qū)域(橙色矩形)的中心。紅色矩形表示安全工作區(qū)域,機(jī)器人平臺(tái)與纜索之間不會(huì)發(fā)生碰撞。下方區(qū)域表示鋼纜的拉伸應(yīng)力。
機(jī)器人通過(guò)傳感器和攝像頭探測(cè)海底垃圾,自動(dòng)將自己定位在垃圾上方,并能舉起重達(dá) 130 公斤的物體(包括自行車、輪胎、箱子和魚網(wǎng))。較小的物體或漂浮在水面上的塑料垃圾則通過(guò)抽吸裝置收集。“由于我們是在海面上作業(yè),只有在需要時(shí)才啟動(dòng)抓手或抽吸裝置,因此我們可以實(shí)現(xiàn)高選擇性,最大限度地減少對(duì)海底生態(tài)系統(tǒng)的影響。”來(lái)自 TECNALIA 的 MAELSTROM 項(xiàng)目經(jīng)理 Mariola Rodríguez 解釋道。
定位絞盤由倍福的 AX5118 伺服驅(qū)動(dòng)器和 AM8071 伺服電機(jī)同步控制。“為了確保穩(wěn)健、精確和快速定位,我們選擇了無(wú)刷同步伺服電機(jī)。”TECNALIA 纜索機(jī)器人團(tuán)隊(duì)的電子工程師 Jose Gorrotxategi 指出。另一個(gè)優(yōu)勢(shì)是驅(qū)動(dòng)器采用了單電纜技術(shù)(OCT),減少了絞盤的布線工作和空間需求。絞盤鋼索可確保機(jī)器人支架在水下精確定位,并在水流湍急的情況下保持高穩(wěn)定性。電機(jī)軸上的編碼器可檢測(cè)電纜卷筒的角度位置和轉(zhuǎn)數(shù),從而間接確定盤繞電纜的長(zhǎng)度。
電磁制動(dòng)器和力傳感器對(duì)纜索張力的監(jiān)測(cè)確保了應(yīng)用所需的安全性。如果測(cè)量結(jié)果超出允許范圍,纜索機(jī)器人會(huì)立即停止工作,并顯示錯(cuò)誤信息。
水上水下傳感器集群
水下纜索機(jī)器人支架內(nèi)裝有多個(gè)傳感器和攝像頭用于控制和監(jiān)測(cè),支持手動(dòng)、自動(dòng)和遠(yuǎn)程操作。“只要水下能見(jiàn)度不是太低,就能手動(dòng)控制攝像頭和照明燈。”TECNALIA 纜索機(jī)器人團(tuán)隊(duì)的機(jī)械工程與控制工程師 Pierre-Elie Herve 補(bǔ)充道。操作人員可以點(diǎn)擊攝像頭畫面中感興趣的海底位置,機(jī)器人就會(huì)自動(dòng)靠近這些位置。機(jī)器人支架上的壓力傳感器可檢測(cè)潛水深度,慣性測(cè)量單元(IMU)可控制機(jī)器人在水中的位置。多普勒速度儀(DVL)通過(guò)四個(gè)聲納傳感器記錄移動(dòng)平臺(tái)與海底的距離及其相對(duì)速度。
其它傳感器(包括一個(gè)壓力傳感器)放置在水上浮橋上,用于在深度控制過(guò)程中補(bǔ)償大氣壓力的變化。兩個(gè) GPS 實(shí)時(shí)動(dòng)態(tài)定位裝置實(shí)時(shí)確定駁船的位置和垂直方向。來(lái)自這些不同系統(tǒng)的所有數(shù)據(jù)都被整合到機(jī)器人的控制和位置調(diào)節(jié)系統(tǒng)中。例如,根據(jù)這些數(shù)值,機(jī)器人平臺(tái)可以精確接近并保持之前在深度圖(水深測(cè)量地形圖)上選定的位置,從而提高機(jī)器人的工作效率。“這種能力已經(jīng)在威尼斯瀉湖非常渾濁的水域中得到了充分彰顯。”Mariola Rodríguez 指出。
纜索機(jī)器人的控制和通信
水下電纜機(jī)器人共有 12 根軸(8 個(gè)絞盤和浮橋桅桿上的 4 個(gè)垂直活動(dòng)滑塊),由 C6650 控制柜式工業(yè) PC 中安裝的 TwinCAT 3 控制。工業(yè) PC 安裝在控制室的主控制柜中。除了索力監(jiān)測(cè)之外,系統(tǒng)(控制室、無(wú)線操控和絞盤)上的多個(gè)急停按鈕也可確保機(jī)器人安全運(yùn)行。相應(yīng)的安全邏輯由 TwinSAFE 邏輯端子模塊 EL6910 執(zhí)行。帶抱閘的伺服驅(qū)動(dòng)器通過(guò) AX5805 TwinSAFE 驅(qū)動(dòng)器選項(xiàng)卡集成到安全應(yīng)用中。
另外四個(gè)配電模塊分散安裝在內(nèi)含 I/O 接口模塊和索力測(cè)量電子裝置的纜索絞盤上。控制柜與配電模塊之間的連接通過(guò) Ethercat P 完成。Jose Gorrotxategi 評(píng)論道:“EtherCAT 技術(shù)的這一擴(kuò)展使得直流供電和 EtherCAT 實(shí)時(shí)通信能夠通過(guò)一根電纜實(shí)現(xiàn)。”
機(jī)器人平臺(tái)控制
操作人員通過(guò)操縱桿以及水下移動(dòng)平臺(tái)的估計(jì)位置和移動(dòng)平臺(tái)上的攝像頭控制纜索機(jī)器人。除了通過(guò)水下攝像頭進(jìn)行視覺(jué)控制之外,操作人員還可以通過(guò) HMI 選擇不同的控制模式,并根據(jù)傳感器數(shù)值監(jiān)測(cè)所有功能。
用于水下感知的攝像機(jī)系統(tǒng)主要實(shí)現(xiàn)視覺(jué)伺服控制:操作人員一旦看到海洋垃圾(由于水比較渾濁,距攝像頭的距離相對(duì)較短),就可以點(diǎn)擊攝像頭畫面中的垃圾,纜索機(jī)器人的移動(dòng)平臺(tái)就會(huì)自動(dòng)靠近垃圾。
HMI 中還集成了通過(guò) DVL 系統(tǒng)和攝像頭創(chuàng)建的深度圖。操作人員可以選擇畫面中的任意一個(gè)位置,然后移動(dòng)平臺(tái)就會(huì)向該位置移動(dòng)。除了手動(dòng)操作之外,支架還能自動(dòng)識(shí)別、鎖定和收集垃圾。“人工智能是實(shí)現(xiàn)這一切的基礎(chǔ),它能夠識(shí)別海洋垃圾,并選擇最合適的清除裝置。”Pierre-Elie Herve 解釋道。
針對(duì)海底垃圾清理機(jī)器人平臺(tái)開(kāi)發(fā)的軟件可以實(shí)時(shí)計(jì)算機(jī)器人的地理位置,這要?dú)w功于實(shí)時(shí)全球定位系統(tǒng)(實(shí)時(shí)動(dòng)態(tài)測(cè)量或 RTK)和負(fù)責(zé)測(cè)量和報(bào)告位置或方向并同時(shí)監(jiān)測(cè)和控制絞盤的慣性測(cè)量裝置。此外,海底地形圖上會(huì)顯示機(jī)器人和垃圾位置。機(jī)器人既可以自主移動(dòng),通過(guò)軟件確定“水中的運(yùn)動(dòng)軌跡”,也可以通過(guò)操縱桿手動(dòng)控制。機(jī)器人移動(dòng)時(shí),攝像頭和聲學(xué)傳感器會(huì)掃描海底,測(cè)量深度(水深)并探測(cè)垃圾。這些數(shù)據(jù)都有地理坐標(biāo),并在地形圖上實(shí)時(shí)顯示。




 手機(jī)圖頁(yè)網(wǎng)
手機(jī)圖頁(yè)網(wǎng)



